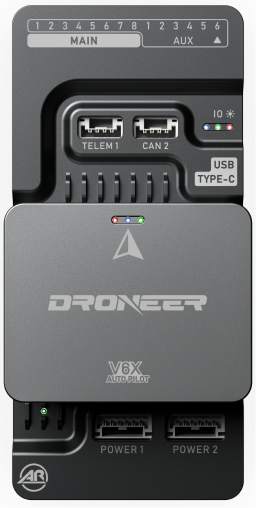
Droneer X701
28分钟续航 | 低延时 | H743主控 | 双陀螺仪 | 双气压计 | 32MB黑匣子
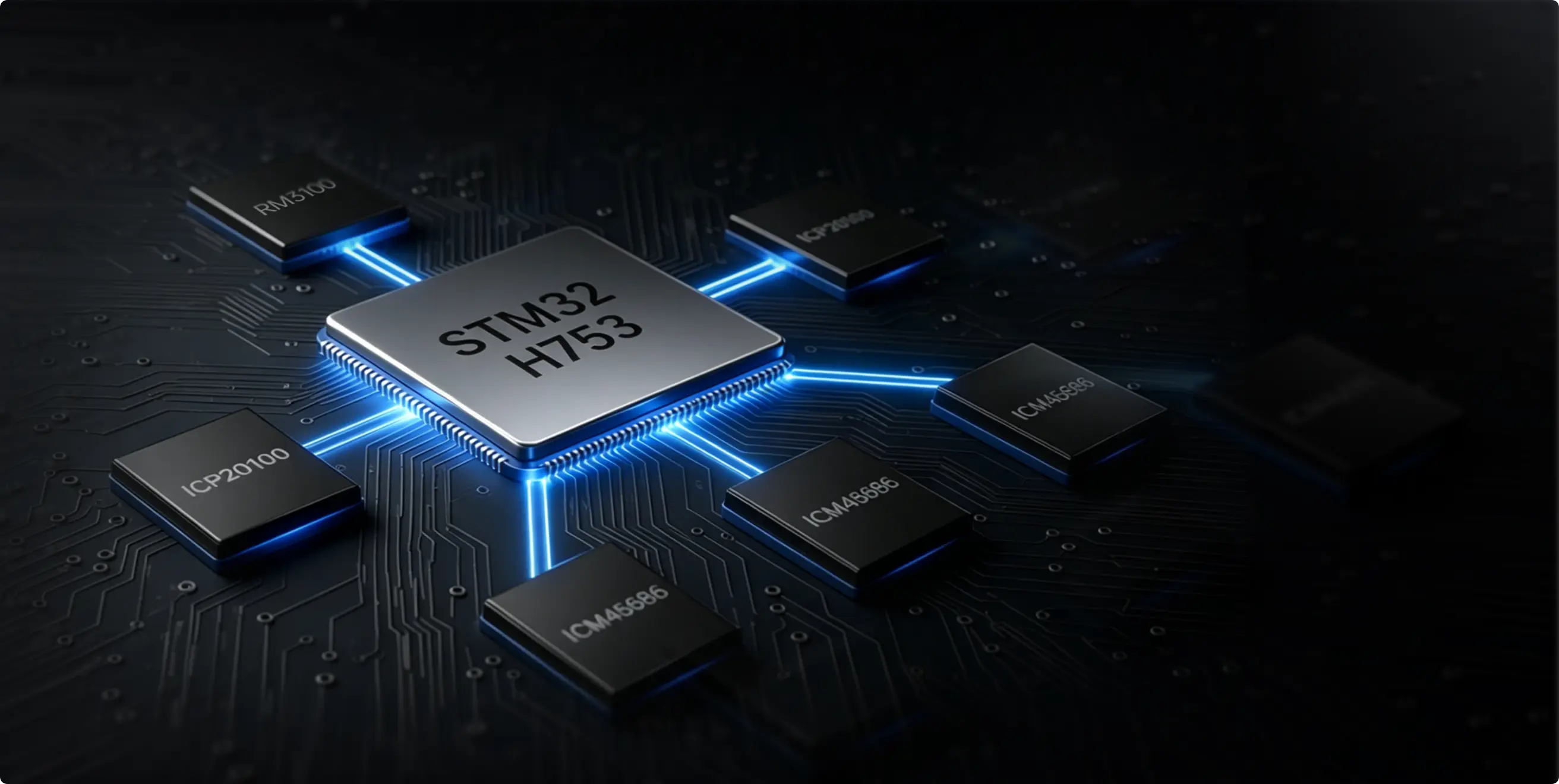
旗舰级H753处理器
采用高性能STM32H753主处理器与 STM32F103协处理器。双芯架构,实现计算与控制的智能分工与高效协同,系统响应更迅速,控制更精准,为复杂任务提供可靠算力保障。冗余设计
独立总线的三冗余 IMU 和双冗余气压计设计,当有一组 IMU 故障时,系统将无缝切换到另外一个可靠的 IMU,降低 IMU 异常导致的事故,让系统运行更加安全。独立IMU减震
独创IMU内置物理减震结构设计 + 软件多级减震算法,双重防护,滤除高频振动,减少陀螺仪噪声,提高运行稳定。FMU v6X架构
采用最新开源 FMU v6X硬件架构,紧跟行业前沿标准,保持与时俱进,全面保障主流开源生态的高度兼容,稳定适配各类开源固件与开发环境。接口丰富
支持 100 Mbps 以太网、CAN、UART、TELEM、SPI、USB 等多种通信与扩展接口,保障了数据传输稳定。兼容ArduPilot /PX4开源系统
适配ArduPilot、PX4 等开源控制生态,适用于无人车、无人船、机器人及其他无人设备的控制与系统集成。IMU恒温设计
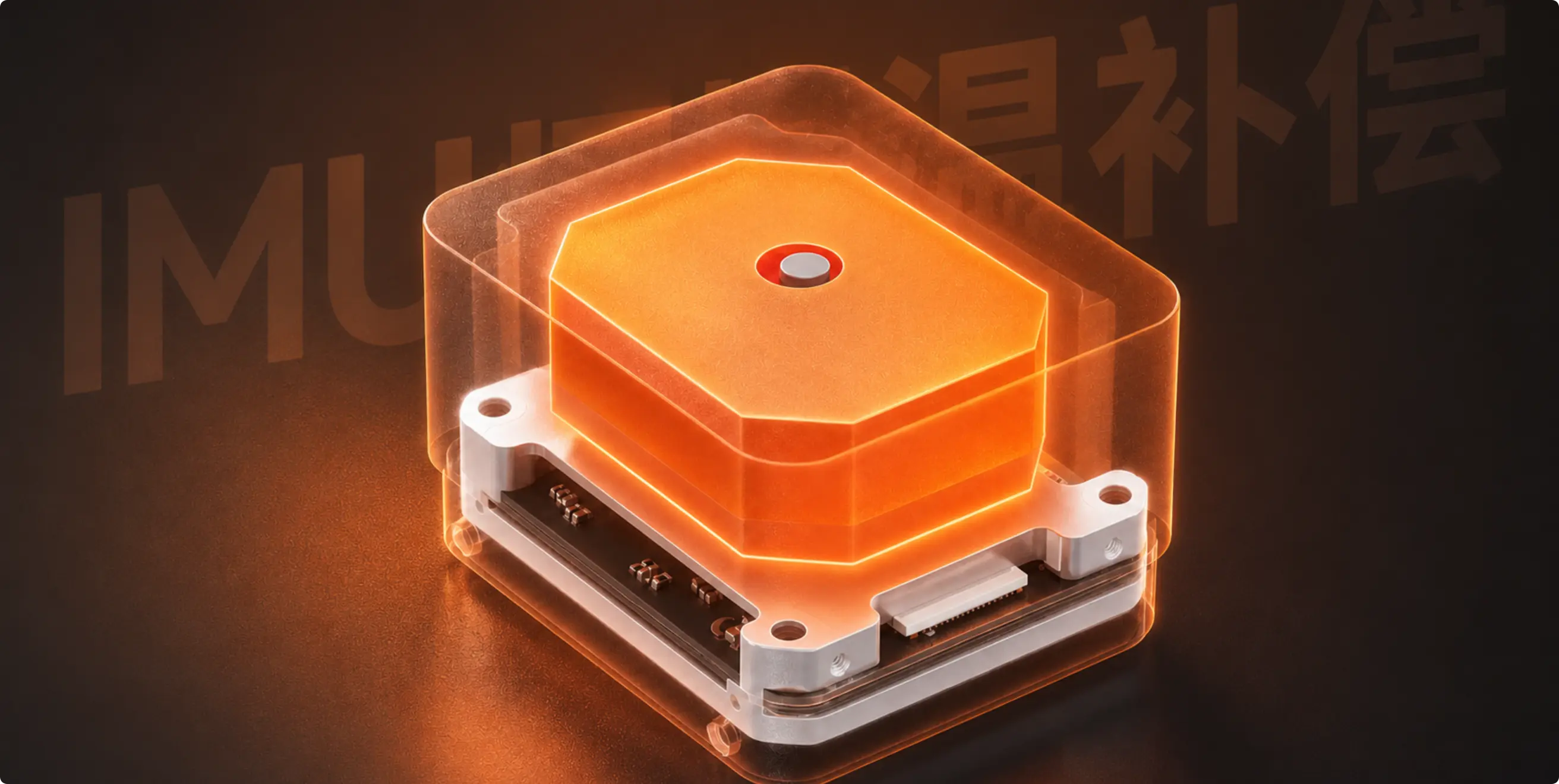
全新升级的IMU高精度传感器温补系统,让传感器处于最佳温度,确保其在低温条件下实现高精度、高灵敏度的稳定运行。开源生态 全场景适配
可与Droneer功能丰富的全系行业产品以及开源生态产品适配,满足不同应用需求。体积小重量轻
采用高集成化设计,结构紧凑、体积小巧、重量轻,降低整机重量负担,助力提升续航时长与载荷能力。采用高性能STM32H753主处理器与 STM32F103协处理器。双芯架构,实现计算与控制的智能分工与高效协同,系统响应更迅速,控制更精准,为复杂任务提供可靠算力保障。
480MHz
运行频率STM32F103
协助处理器1M
RAM内存2M
Flash闪存独立总线的三冗余 IMU 和双冗余气压计设计,当有一组 IMU 故障时,系统将无缝切换到另外一个可靠的 IMU,降低 IMU 异常导致的事故,让系统运行更加安全。
独创IMU内置物理减震结构设计 + 软件多级减震算法,双重防护,滤除高频振动,减少陀螺仪噪声,提高运行稳定。
全新升级的IMU高精度传感器温补系统,让传感器处于最佳温度,确保其在低温条件下实现高精度、高灵敏度的稳定运行。
支持 100 Mbps 以太网、CAN、UART、TELEM、SPI、USB 等多种通信与扩展接口,保障了数据传输稳定。





全面兼容 ArduPilot 与 PX4 两大主流开源固件,适配无人车、无人船、机器人及其他无人设备,支持深度二次开发,赋能多元行业应用。
采用最新开源 FMU v6X硬件架构,紧跟行业前沿标准,保持与时俱进,全面保障主流开源生态的高度兼容,稳定适配各类开源固件与开发环境。
可与Droneer功能丰富的全系行业产品以及开源生态产品适配,满足不同应用需求。

GPS模块

手持地面站

RTK模块
吊舱
感谢您购买Droneer产品。本产品为特殊控制物项,错误操作可能导致物品损害、人员重伤甚至死亡。用户需要承担相应的刑事责任。本产品不适合未满18周岁的人员使用。为了更好地使用此设备并确保您的安全,使用前请仔细阅读说明书,或向产品经销商或生产商咨询。
请把电器部件放在儿童及宠物触碰之外。
确保飞行在飞行空域远离任何人及危险物品,建议您在专用的飞行场地飞行。
在有爆炸物,散发或其它精神状态不佳的情况下进行任何操作请严格按产品手册进行操作。
飞行前请确保供电系统及其他功能模块连接正确,否则可能造成设备的损毁。
遥控器通道校准、固件升级、参数设置前请关闭动力电源或取下螺旋桨,防止电机突然高速旋转。
切勿在人群中飞行。
请把电器部件放在儿童及宠物触碰之外。
1.Droneer产品均为研发、测试、实验控制板及周边任理由引起的直接、间接、衍生性、惩罚性或意外伤害责任(包含意外人身伤亡、业务损失、业务中断、无法使用、数据或设备损失、以及设备或系统故障等),不论依据法律或衡平法下任何合同责任或任何责任或保证、过失、严格产品责任或其他理论或方法,均可被排除。如果硬件超出保修期或我们承诺的30天内无条件换新服务,由厂家或产品本身导致的严重损害,我们不承担超于产品价值30倍的责任。
2.本产品仅为特殊控制物,用户使用本产品的一切行为为用户责任,对于直接或间接使用本产品产生的一切后果或责任,本公司不作任何担保。
3.本产品使用过程中,对于造成违反公共秩序或公共安全行为的,用户须承担相关法律责任。
4.对于以下几种情形,我们不提供任何技术支持和安全责任承诺:
(1) 未经授权改装、调配和更换零件的产品。
(2) 保修标签、飞行数据丢失的产品。
(3) 由于个人操作失误或自然灾害不可抗拒的因素造成人员伤害及财产损失。
(4) 如拆封时使用,代表您同意以上条款,并熟知相关产品的危险性。
(5) 如拆封时使用,代表您同意以上条款,并熟知相关产品的危险性。
4.平台合规与最终用户承诺声明 为共同遵守国际贸易法规与中国法律,作为在平台采购产品的用户,您需知悉并同意遵守以下规定:
5.采购与使用承诺: 您承诺,通过本平台采购的所有商品均用于于合法、合规的民用用途。您不得将商品用于任何军事用途、军事禁飞区、或任何与武器装备、大规模杀伤性武器相关的活动。
6.出口与转售限制:
(1).不将商品直接或间接出口、转运至任何受中国法律或国际制裁的国家/地区。
(2).不将商品提供给任何被中国或国内监管机构列入限制清单的实体或个人。
(3).若您将商品转售给下游客户,您有义务确保其作出与本声明核心条款一致的合规承诺。
责任与违约后果: 您已充分理解,如您违反上述承诺(包括虚假信息、违规使用、非法出口等),导致我公司遭受任何调查、处罚或损失(包括经济赔偿、商誉损失等),您将承担全部赔偿责任。 同时,本声明有权立即中止或终止向您提供服务,并依法追究您的违约责任。 本声明的效力具有独立性,不因您与平台间交易的完成而失效。